CNN (Convolutional Neural Networks)
Contents
CNN (Convolutional Neural Networks)#
%matplotlib inline
import os
import time
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import torch
import torchvision
import torchvision.transforms as transforms
import torch.nn as nn
import torch.optim as optim
from torch.utils.data import DataLoader, TensorDataset
from IPython.display import YouTubeVideo
from PIL import Image
from tqdm import tqdm
def plot(X):
plt.imshow(X, cmap='gray', vmin=0, vmax=1)
plt.axis('off')
def apply_filter(X, F):
x, y = X.shape
filter_x, filter_y = F.shape
X_with_filter = np.zeros(shape=(x - filter_x, y - filter_y))
for i in range(x - filter_x):
for j in range(y - filter_y):
X_with_filter[i, j] = (X[i:(i+filter_x), j:(j+filter_y)] * F).sum()
return X_with_filter
!curl https://raw.githubusercontent.com/trokas/ai_primer/master/img/castle.jpg --output castle.jpg
% Total % Received % Xferd Average Speed Time Time Time Current
Dload Upload Total Spent Left Speed
100 9217 100 9217 0 0 33602 0 --:--:-- --:--:-- --:--:-- 33638
img = Image.open('castle.jpg')
img.load()
X = np.asarray(img, dtype="int32") / 255
# X = X.mean(axis=2) / 255
plot(X)
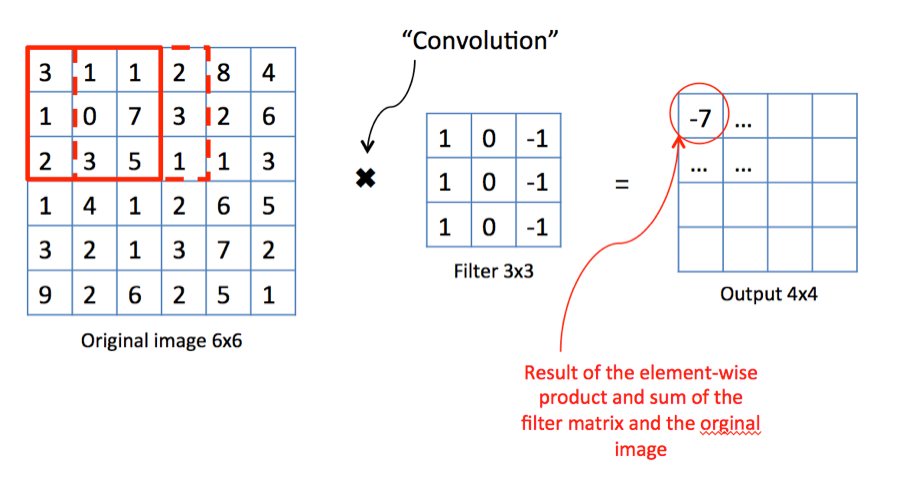
Filters#
It turns out that by sliding simple matrix over an image we can achieve neat things.
Multiplication by sliding matrix can be thought of as filter.
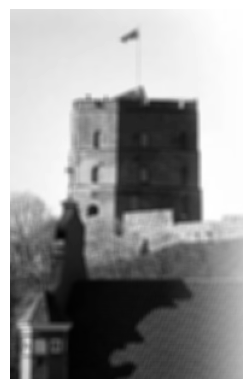
Simple box blur#
F = np.ones(shape=(5, 5)) / 25
plot(apply_filter(X, F))
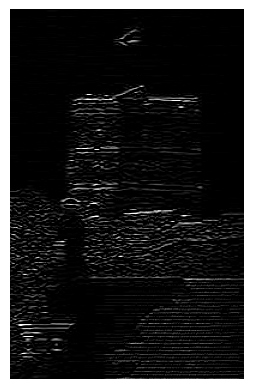
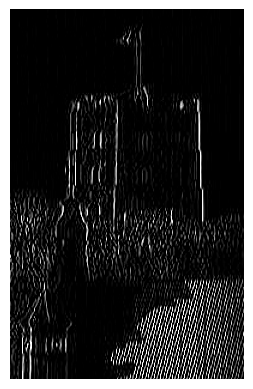
Line detection#
F = np.array([[-1, -1, -1],
[ 2, 2, 2],
[-1, -1, -1]])
plot(apply_filter(X, F))
F = np.array([[-1, 2, -1],
[-1, 2, -1],
[-1, 2, -1]])
plot(apply_filter(X, F))
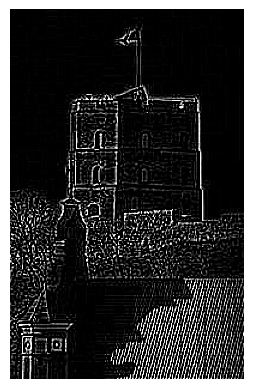
Edge detection#
F = np.array([[-1, -1, -1],
[-1, 8, -1],
[-1, -1, -1]])
plot(apply_filter(X, F))
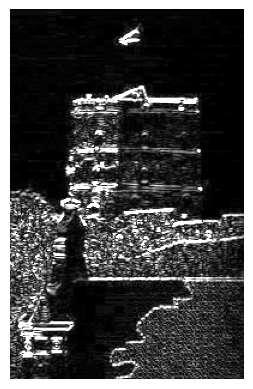
The Sobel Edge Operator#
F_horizontal = np.array([[-1, -2, -1],
[ 0, 0, 0],
[ 1, 2, 1]])
F_vertical = np.array([[-1, -2, -1],
[ 0, 0, 0],
[ 1, 2, 1]])
plot(np.sqrt(apply_filter(X, F_horizontal)**2 + apply_filter(X, F_vertical)**2))
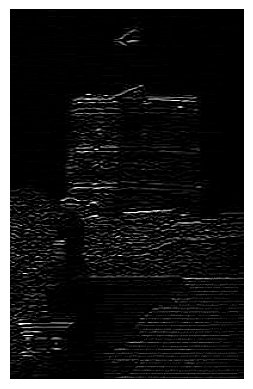
Filters in PyTorch#
CNN’s in PyTorch do exactly the same thing as we did above, for example let’s replicate line detection filter. First let’s inititialize convolutional layer and pass input just to make sure that it works with random weights. Note that we need to add some axes to make it work.
conv = nn.Conv2d(in_channels=1, out_channels=1, kernel_size=3, padding='valid', bias=True)
X_tensor = torch.tensor(X, dtype=torch.float32).unsqueeze(0)
X_tensor.shape, conv(X_tensor).shape
(torch.Size([1, 312, 198]), torch.Size([1, 310, 196]))
Now let’s manually set weights.
F = np.array([[-1, -1, -1],
[ 2, 2, 2],
[-1, -1, -1]])
# Add in_channels and out_channels dimensions
F_tensor = torch.tensor(F, dtype=torch.float32).unsqueeze(0).unsqueeze(0)
conv.weight = nn.Parameter(F_tensor) # Set the weights
conv.bias = nn.Parameter(torch.tensor([0.0])) # Set the bias
Let’s check if outputs looks as expected.
plot(conv(X_tensor)[0].detach().numpy())
CNN#
Super short history#
In 1964 Hubel and Wiesel discovered some interesting facts about cats’ visual cortex (see original video). It turns out that there are specific neurons which react to different shapes, also it looks like there is hierarchical structures and basic forms are used as a basic building blocks for later neurons.

In 1979 neocognitron was proposed by Kunihiko Fukushima and in 1980s CNN were finally developed. Le Couns group made them work on MNIST by intoducing LeNet-5 architecture.
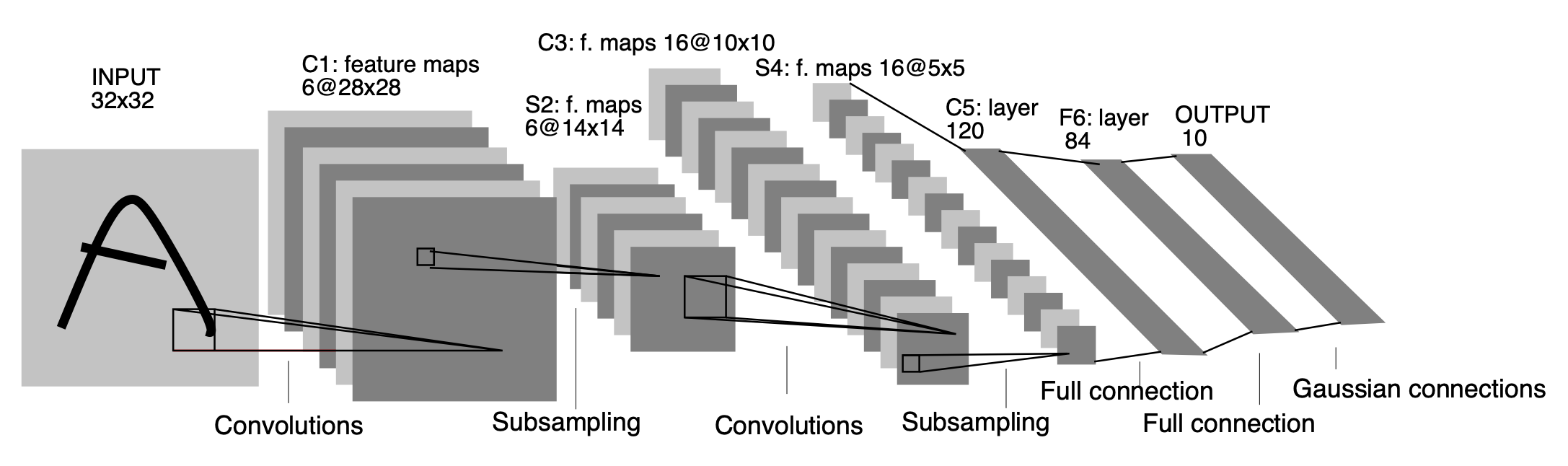
Even though LeNet-5 was used for character recognition in some banks from 1980s, next real advancement came only in 2012 with AlexNet which won ImageNet competition at the time and was comprised of 60M parameters (compared to 60k used in LeNet-5). From that point CNN’s only grew in size (see top 10 architectures).

It turns out that CNN’s do a similar thing as neurons in Hubel and Wiesels cortex model - lower levels detect simple shapes and in later layers they are combined.
Implementation#
Just as with simple fully connected networks you can try to write logic from scratch before jumping to using PyTorch or other ML library just to get deeper understanding of what is going on, for example see this post.
Let’s load MNIST dataset.
transform = transforms.Compose([transforms.ToTensor(), transforms.Normalize((0.5,), (0.5,))])
trainset = torchvision.datasets.MNIST(root='./data', train=True, download=True, transform=transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=64, shuffle=True)
testset = torchvision.datasets.MNIST(root='./data', train=False, download=True, transform=transform)
testloader = torch.utils.data.DataLoader(testset, batch_size=64, shuffle=False)
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
self.fc1 = nn.Linear(28*28, 128)
self.fc2 = nn.Linear(128, 64)
self.fc3 = nn.Linear(64, 10)
def forward(self, x):
x = x.view(-1, 28*28)
x = torch.relu(self.fc1(x))
x = torch.relu(self.fc2(x))
x = self.fc3(x)
return x
net = Net()
criterion = nn.CrossEntropyLoss()
optimizer = optim.SGD(net.parameters(), lr=0.003, momentum=0.9)
epochs = 10
losses = []
for epoch in range(epochs):
running_loss = 0.0
for images, labels in trainloader:
optimizer.zero_grad()
outputs = net(images)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
running_loss += loss.item()
losses.append(running_loss / len(trainloader))
print(f"Epoch {epoch+1}, Loss: {running_loss/len(trainloader)}")
Epoch 1, Loss: 0.6591604269866241
Epoch 2, Loss: 0.2890638561883588
Epoch 3, Loss: 0.2289492787439813
Epoch 4, Loss: 0.18390724537119682
Epoch 5, Loss: 0.15293520742229053
Epoch 6, Loss: 0.1306728734148305
Epoch 7, Loss: 0.11406803670635166
Epoch 8, Loss: 0.10008440609735403
Epoch 9, Loss: 0.08983678015163427
Epoch 10, Loss: 0.0814937459620665
plt.plot(range(epochs), losses)
plt.xlabel('Epoch')
plt.ylabel('Loss')
plt.title('Loss Curve')
plt.show()
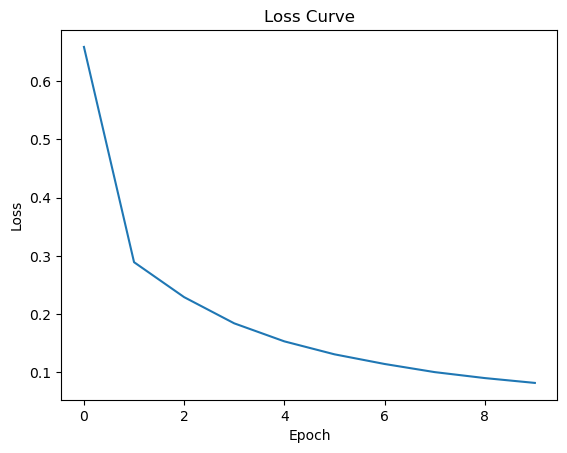
Reminder: using FCN we had 96.36% on test set.
correct = 0
total = 0
with torch.no_grad():
for images, labels in testloader:
outputs = net(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print(f'Accuracy of the network on the 10000 test images: {100 * correct / total}%')
Accuracy of the network on the 10000 test images: 97.75%
TASK: add validation loss to the training loop and plot both curves after training.
What’s next?#
NOTE: LONG TRAINING TIME!
For faster training you can use colab, just change it GPU mode by setting it at Edit -> Notebook settings -> Hardware accelerator.
There are multiple other tricks (Dropout, MaxPooling, …) which can increse performance even more, but general CNN principle is still leading solution in image recognition.
We will look at these tricks in datail during the lecture, for now let’s see what they can do.
# Check if CUDA is available, otherwise check for MPS, else use CPU
device = "cuda" if torch.cuda.is_available() else "mps" if torch.backends.mps.is_available() else "cpu"
print(f"Using device: {device}")
Using device: mps
import torch.nn.functional as F
class Net(nn.Module):
def __init__(self):
super(Net, self).__init__()
# Convolutional layers
self.conv1 = nn.Conv2d(1, 32, kernel_size=3)
self.bn1 = nn.BatchNorm2d(32)
self.conv2 = nn.Conv2d(32, 32, kernel_size=3)
self.bn2 = nn.BatchNorm2d(32)
self.pool = nn.MaxPool2d(2, 2)
self.bn3 = nn.BatchNorm2d(32)
# Dense layers
self.fc1 = nn.Linear(32 * 12 * 12, 128) # Adjusted for the output size after conv and pooling layers
self.dropout = nn.Dropout(0.2)
self.fc2 = nn.Linear(128, 10)
def forward(self, x):
x = F.relu(self.bn1(self.conv1(x)))
x = F.relu(self.bn2(self.conv2(x)))
x = self.pool(x)
x = self.bn3(x)
x = torch.flatten(x, 1) # Flatten all dimensions except batch
x = F.relu(self.fc1(x))
x = self.dropout(x)
x = self.fc2(x)
return x
net = Net().to(device)
# Loss function and optimizer
criterion = nn.CrossEntropyLoss()
optimizer = optim.Adadelta(net.parameters())
epochs = 10
losses = []
for epoch in range(epochs):
running_loss = 0.0
for images, labels in tqdm(trainloader):
images, labels = images.to(device), labels.to(device)
optimizer.zero_grad()
outputs = net(images)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
running_loss += loss.item()
losses.append(running_loss / len(trainloader))
print(f"Epoch {epoch+1}, Loss: {running_loss/len(trainloader)}")
100%|█████████████████████████████████████████| 938/938 [00:12<00:00, 72.95it/s]
Epoch 1, Loss: 0.04964635392683789
100%|█████████████████████████████████████████| 938/938 [00:11<00:00, 78.75it/s]
Epoch 2, Loss: 0.0319404945256616
100%|█████████████████████████████████████████| 938/938 [00:11<00:00, 79.73it/s]
Epoch 3, Loss: 0.02221851827272291
100%|█████████████████████████████████████████| 938/938 [00:11<00:00, 79.23it/s]
Epoch 4, Loss: 0.016258836341969386
100%|█████████████████████████████████████████| 938/938 [00:12<00:00, 77.78it/s]
Epoch 5, Loss: 0.013607240666595502
100%|█████████████████████████████████████████| 938/938 [00:12<00:00, 78.03it/s]
Epoch 6, Loss: 0.01015313278053167
100%|█████████████████████████████████████████| 938/938 [00:11<00:00, 78.55it/s]
Epoch 7, Loss: 0.008300642033510981
100%|█████████████████████████████████████████| 938/938 [00:11<00:00, 79.11it/s]
Epoch 8, Loss: 0.00605639193290476
100%|█████████████████████████████████████████| 938/938 [00:11<00:00, 79.59it/s]
Epoch 9, Loss: 0.005098030387810556
100%|█████████████████████████████████████████| 938/938 [00:11<00:00, 79.03it/s]
Epoch 10, Loss: 0.005710192270729889
correct = 0
total = 0
with torch.no_grad():
for images, labels in testloader:
images, labels = images.to(device), labels.to(device)
outputs = net(images)
_, predicted = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (predicted == labels).sum().item()
print(f'Accuracy of the network on the 10000 test images: {100 * correct / total}%')
Accuracy of the network on the 10000 test images: 98.97%
Usually in blogs and books you will find implementation which uses dropout between CNN layers, but there is well known critique of this technique.
So where are we on MNIST?#
We tried RF, DNN and CNN for MNIST and managed to reproduced some of the key benchmarks out there

U-Net#
There are various architectures in which CNNs are used. As an example let’s dig into U-Net which can be really useful when the goal is to perform image segmentation. Instead of using images we will try to use it for peak area estimation for noisy sequences.
def generate_sequences_and_masks(num_sequences, sequence_length):
X = np.zeros((num_sequences, sequence_length))
y = np.zeros((num_sequences, sequence_length))
for i in range(num_sequences):
# Randomly choose peak start, end, and height
peak_start = np.random.randint(0, sequence_length // 2)
peak_end = np.random.randint(peak_start + 1, sequence_length)
peak_height = np.random.uniform(1, 3)
# Create peak
X[i, peak_start:peak_end] = peak_height
y[i, peak_start:peak_end] = 1 # Mark the peak area
# Add sinusoidal wave to the sequence
frequency = np.random.uniform(0.05, 0.2) # Frequency of the wave
amplitude = np.random.uniform(0.5, 1.5) # Amplitude of the wave
phase = np.random.uniform(0, 2 * np.pi) # Phase shift
wave = amplitude * np.sin(2 * np.pi * frequency * np.arange(sequence_length) + phase)
X[i] += wave
# Add random noise
noise_level = 0.1
noise = noise_level * np.random.randn(sequence_length)
X[i] += noise
return X, y
def visualize_sequences(X, y):
num_sequences = X.shape[0]
plt.figure(figsize=(6, num_sequences * 2))
for i in range(num_sequences):
plt.subplot(num_sequences, 1, i+1)
plt.plot(X[i], label='Sequence')
plt.fill_between(range(len(y[i])), 0, y[i] * np.max(X[i]), color='red', alpha=0.3, label='Peak Mask')
plt.legend()
plt.ylim(0, np.max(X) + 1)
plt.tight_layout()
plt.show()
# Parameters
num_sequences = 5
sequence_length = 100
# Generate data
X, y = generate_sequences_and_masks(num_sequences, sequence_length)
# Visualization
visualize_sequences(X, y)
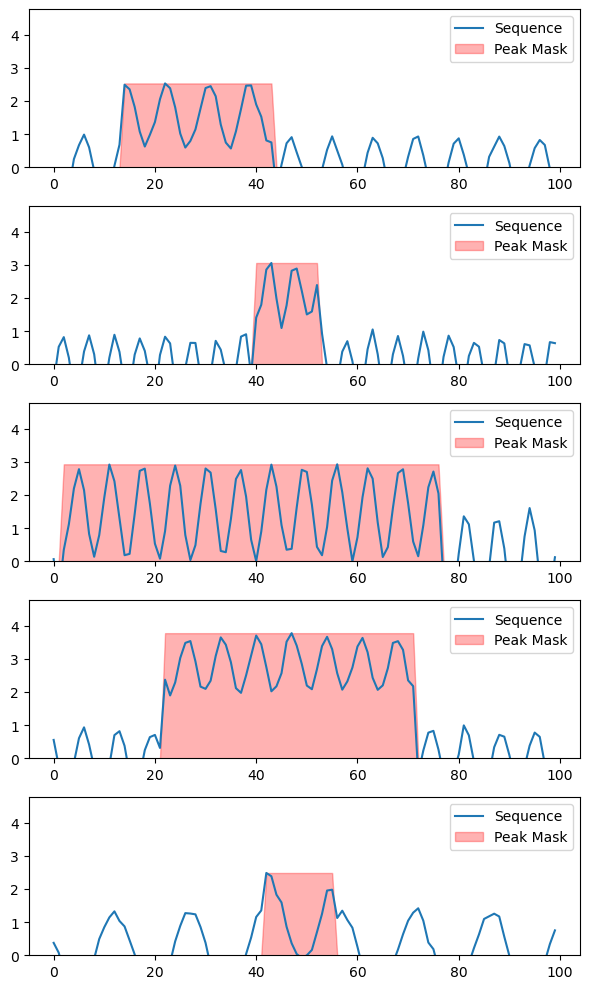
As you can see task can not be solved by a trivial thresholding. It would require some clever tricks to come up with an algorithm to achieve the desired result. Let’s instead try to achieve that using a model.
Main trick of U-Net is compression with skip connections
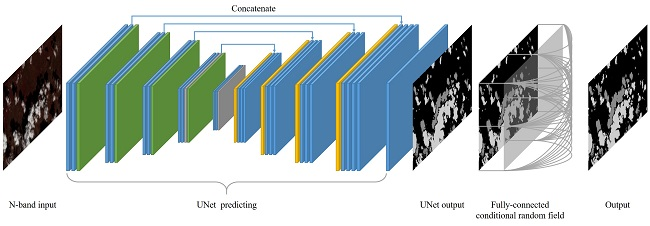
In our case we are dealing with 1D sequence, but the idea stays the same: use CNN with stride to compress, then use deconvolution and concatenate with matching layer from before.
class UNet(nn.Module):
def __init__(self):
super(UNet, self).__init__()
self.down1 = nn.Sequential(
nn.Conv1d(1, 16, kernel_size=3, padding=1),
nn.ReLU()
)
self.down2 = nn.Sequential(
nn.Conv1d(16, 32, kernel_size=3, stride=2, padding=1),
nn.ReLU()
)
self.up1 = nn.Sequential(
nn.ConvTranspose1d(32, 16, kernel_size=3, stride=2, padding=1, output_padding=1),
nn.ReLU()
)
self.out_conv = nn.Conv1d(32, 1, kernel_size=3, padding=1)
self.sigmoid = nn.Sigmoid()
def forward(self, x):
# Encoder
x1 = self.down1(x)
x2 = self.down2(x1)
# Decoder
x3 = self.up1(x2)
# Concatenate along the channel dimension
x3 = torch.cat((x3, x1), dim=1)
# Passing through the final layers
x4 = self.out_conv(x3)
return self.sigmoid(x4)
model = UNet()
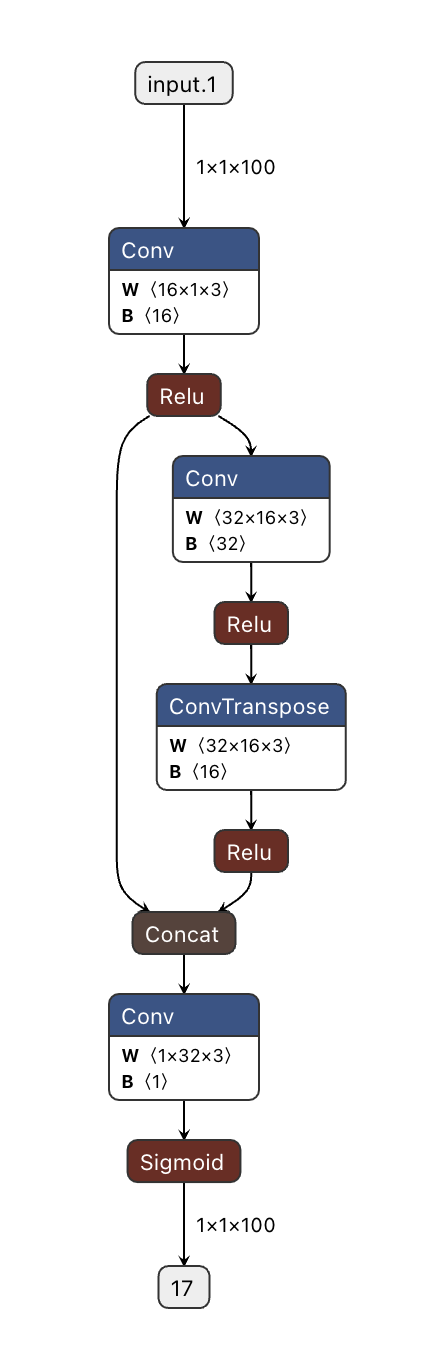
To visualize the model you can save it as onnx and then open it using Netron.
import torch.onnx
dummy_input = torch.randn(1, 1, 100)
torch.onnx.export(model, dummy_input, "unet_model.onnx")
This should give you
# Generate data
X, y = generate_sequences_and_masks(200, 100)
# We have to add extra dimension for CNNs and convert to torch tensors
X = torch.tensor(X[:, np.newaxis, :], dtype=torch.float32)
y = torch.tensor(y[:, np.newaxis, :], dtype=torch.float32)
# Create DataLoader
dataset = TensorDataset(X, y)
dataloader = DataLoader(dataset, batch_size=10, shuffle=True)
criterion = nn.BCELoss()
optimizer = optim.Adam(model.parameters(), lr=0.001)
num_epochs = 20
for epoch in range(num_epochs):
for inputs, labels in dataloader:
optimizer.zero_grad()
outputs = model(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
print(f'Epoch {epoch+1}, Loss: {loss.item()}')
Epoch 1, Loss: 0.5489223003387451
Epoch 2, Loss: 0.34984028339385986
Epoch 3, Loss: 0.12711112201213837
Epoch 4, Loss: 0.05468541756272316
Epoch 5, Loss: 0.10239103436470032
Epoch 6, Loss: 0.09671585261821747
Epoch 7, Loss: 0.11851236969232559
Epoch 8, Loss: 0.09198583662509918
Epoch 9, Loss: 0.04309234395623207
Epoch 10, Loss: 0.09712385386228561
Epoch 11, Loss: 0.04905369505286217
Epoch 12, Loss: 0.0534295029938221
Epoch 13, Loss: 0.04960276558995247
Epoch 14, Loss: 0.09613198786973953
Epoch 15, Loss: 0.06632597744464874
Epoch 16, Loss: 0.09436706453561783
Epoch 17, Loss: 0.09682081639766693
Epoch 18, Loss: 0.05923569202423096
Epoch 19, Loss: 0.060930199921131134
Epoch 20, Loss: 0.07364819198846817
Let’s see how our predictions look like.
def visualize_predictions(X, y, model):
model.eval()
with torch.no_grad():
# Ensure that X is properly formatted as a float tensor and add channel dimension if necessary
if X.dim() == 2: # If X is [sequence_length, num_features] shape
X = X.unsqueeze(1) # Reshape to [sequence_length, 1, num_features] if necessary
predictions = model(X)
num_sequences = X.shape[0]
plt.figure(figsize=(10, num_sequences * 4))
for i in range(num_sequences):
plt.subplot(num_sequences, 2, 2 * i + 1)
plt.plot(X[i, 0].numpy(), label='Sequence')
plt.fill_between(range(X.shape[2]), 0, y[i, 0].numpy() * np.max(X[i, 0].numpy()), color='red', alpha=0.3, label='Actual Mask')
plt.legend()
plt.title('Actual Mask')
plt.subplot(num_sequences, 2, 2 * i + 2)
plt.plot(X[i, 0].numpy(), label='Sequence')
plt.fill_between(range(X.shape[2]), 0, predictions[i, 0].numpy() * np.max(X[i, 0].numpy()), color='blue', alpha=0.3, label='Predicted Mask')
plt.legend()
plt.title('Predicted Mask')
plt.tight_layout()
plt.show()
X_vis, y_vis = X[:5], y[:5] # select the first 5 for visualization
visualize_predictions(X_vis, y_vis, model)
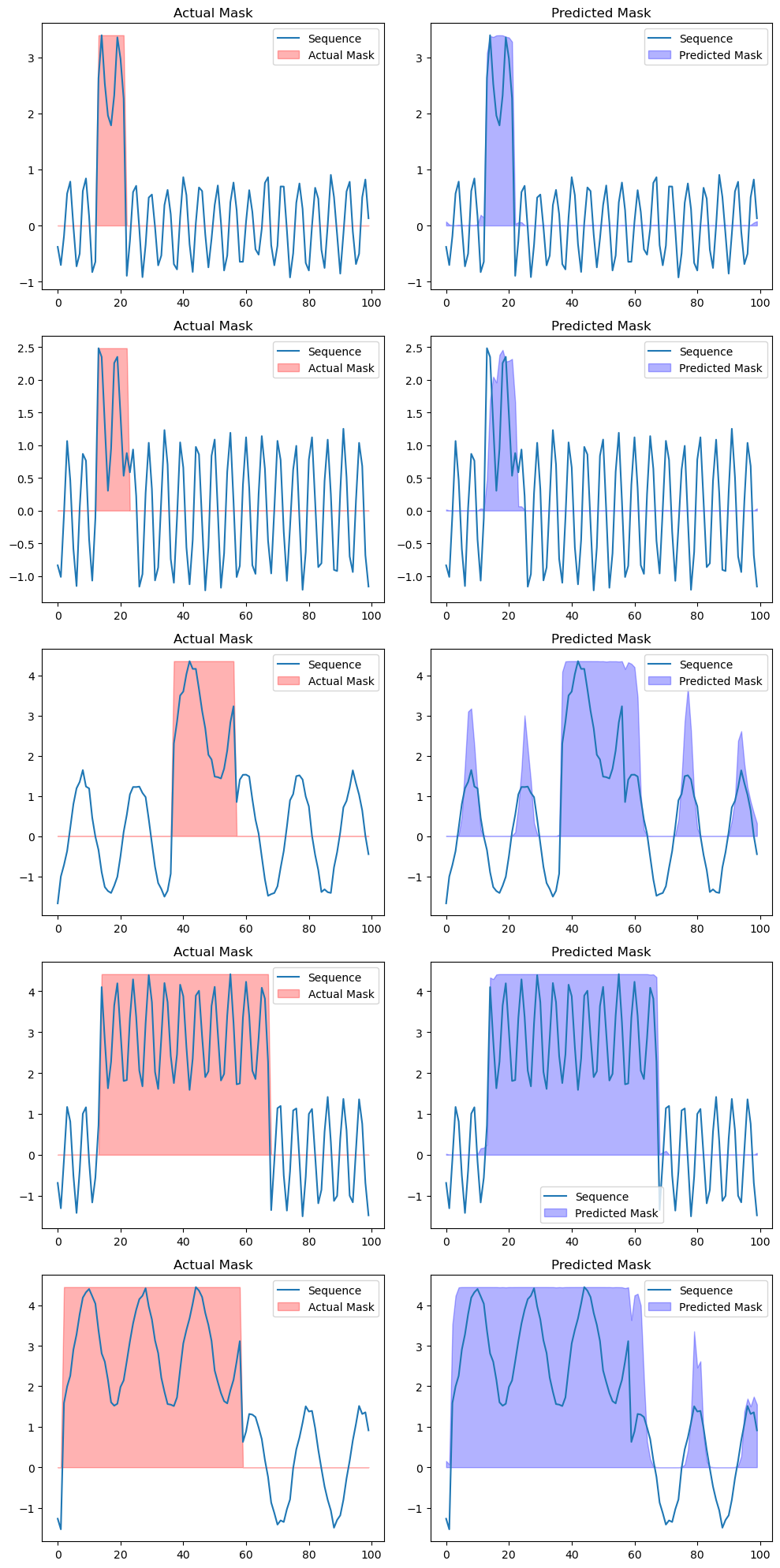
U-Nets are known to work pretty well with limites datasets and as you can see it worked out really nicely here.
(re)Sources#
Crazy example of how filters (convolutionas) can be used - Neural Celural Automata